
Эксплуатация беспилотных авиационных систем
Содержание
Профстандарт в сфере эксплуатации беспилотных авиационных систем
Профстандарт БПЛА — это определенный свод знаний, умений и навыков, которые должен знать и уметь каждый специалист в сфере беспилотной авиации.
Основные направления профстандарта связаны с выполнением полетов на дронах, подготовки к полётам, ремонту беспилотных летательных аппаратов и их техническому обслуживанию. Законодательные требования к направлениям закреплены в Воздушном кодексе РФ
Полеты на дронах
Давайте начнем с полетов. Поговорим про мультироторные платформы. Принципы профстандарта применимы к беспилотными летательными аппаратами многих типов, но рассматривать мы будем на примере квадрокоптеров.
Пульт управления дроном
В подобных летательных системах для того, чтобы выполнять полеты в ручном режиме, используется аппаратура управления. У каждой аппаратуры управления есть стандартные органы управления, которые могут быть расположены по-разному, но суть всегда одна и та же. Принцип управления дроном основан на рычагах управления – стиках. Есть два стика: левый правый. Как правило, левый стик не подпружинен, хотя бывают и исключения. Правый же стик подпружинен всегда. То есть, если его отпустить, он вернется в центральное положение.
Эти стики служат для управления дроном. При этом, какие именно каналы отвечают за управление каждым стиком, настраивается в аппаратуре.
Моды аппаратуры управления
Есть четыре основных типа конфигурации или моды (modes) аппаратуры управления беспилотным дроном. Они называются «Mode 1», «Mode 2», «Mode 3» и «Mode 4». Самый распространенный «Mode 2». Его чаще всего применяют для мультироторных платформ и для самолетов. При помощи него также удобно управлять машинками и любой другой техникой на радиоуправлении.
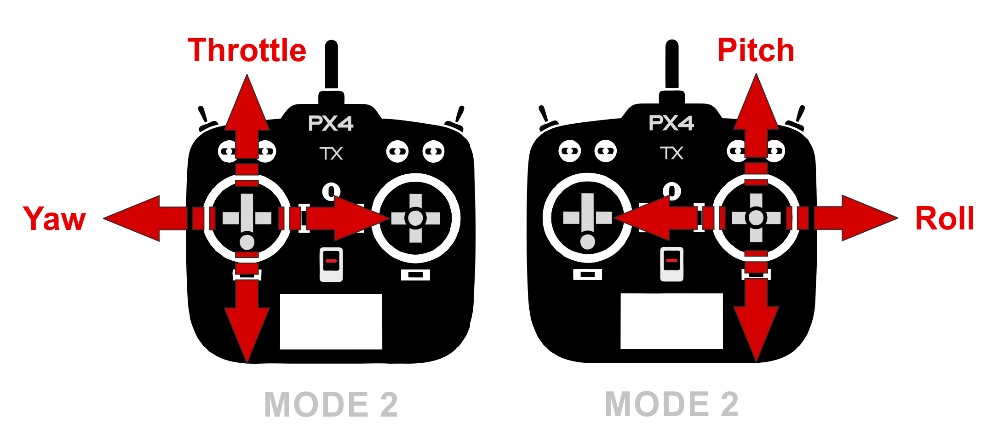
Mode 2
Что такое второй мод? Это расположение стиков таким образом, что левый стик отвечает за контроль газа. Если вы отклоните левый стик вниз или вверх, вы измените уровень газа модели. То есть, когда левый стик внизу, газ минимальный, когда вверху – максимальный.
Если же вы отклоните левый стик влево или вправо, то вы развернете вашу модель по часовой или против часовой стрелки. Это повороты направо и налево.
Правый же стик отвечает за наклоны дронов. Если вы его отклоните вверх, то Дрон наклониться вперед. Если вы его отклоните вниз, то дрон отклонится назад. Если вы его отклоните вправо, дрон наклонится направо. Если налево, то и дрон налево. Таким образом идет управление коптером. То есть все степени свободы вы контролируете при помощи двух стиков.
На пульте управления дроном есть дополнительные тумблеры. Они бывают двухпозиционные, то есть у них положение меняется — перещелкивается либо в одно положение, либо в друге. Есть трехпозиционные тумблеры. То есть у них есть верхнее положение, центральное и нижнее.
Также существуют различные потенциометры, которые могут выдавать промежуточные значения. Они нужны для настройки различных режимов полетов беспилотников. Например, если я хочу завести дрон, то есть включить моторы, я использую двухпозиционные переключатель. В верхнем положении моторы выключены, в нижним — моторы включены. Есть пульты, в которых мотор заводится, например, перемещением двух стиков влево и вниз.
Режимы стабилизации дрона:
- отсутствие стабилизации;
- стабилизация только по гироскопу;
- стабилизация в режиме stabilight, когда дрон удерживает горизонт и возвращается всегда в одно положение.
Третье положение трехпозиционного тумблера это position, то есть контроль не только угла наклона дрона, но еще его позиции. Если я его смещу, то он вернется обратно. Для этого мне понадобится трехпозиционный тумблер.
Также есть возможность настройки дополнительных режимов, в которых нужно изменять значение не по тумблерам, а плавно.
Какие вы придумаете зависит только от вашего воображения. И все переключатели на аппаратуре управления настраиваются. Вы можете их назначить на любой функционал. Давайте рассмотрим терминологию, которой чаще всего пользуются люди из сферы беспилотных летательных аппаратов.
Но на самом деле если говорить непосредственно про квадрокоптер, то чаще встречаются терминология roll, pitch и yaw. Освоив эту терминологию, вы можете с легкостью ориентироваться, что именно имелось в виду. Наклоны коптера вперед и назад это ось pitch. И как мы с вами уже говорили, это правый стик. Отклонение вверх и вниз это ось pitch.
Следующая ось это наклоны дрона влево или вправо. Это правый стик — влево или вправо. Это ось roll. Следующая ось — это левый стик наклон — влево или вправо. Это ось yaw или вращение вокруг своей оси Ну и четвертый канал это throttle или газ это изменение положения дрона там в пространстве вверх-вниз или разная скорость вращения моторов.
Теперь давайте перейдем к теме устройства дрона. Ведь настоящий специалист в этой области должен не только уметь летать на дронах, но и уметь их обслужить и найти, какие в донах есть неисправности. Соответственно надо хорошо понимать, из чего именно устроен дрон и как отличить ту или иную деталь от другой.
Устройство дрона
Что у нас есть в дроне? Обязательно в любом дроне всегда есть центральный орган управления — это полетный контроллер. Полетные контроллеры бывают разные. Бывают большие, бывают поменьше, бывают совсем маленькие с объединенными другими элементами. Все эти полетные контроллеры легко отличить от других элементов, потому что на них есть одна большая плата. Это и есть мозг, который является центром полетного контроля, и мозгом всего дрона. В таких мозгах используются как правило микроконтроллеры семейства STM stm32. Это современные чипы. Раньше использовались чипы stm32f1. Сейчас используется как правило уже более поздние версии это f4 и f7.
Эти полетные контроллеры уже обладают довольно мощным функционалом. Они позволяют стабилизировать коптер и при этом очень быстро обрабатывать информацию со всех датчиков. Дальше их задача — качественно отдавать воздействие на моторы.
Моторы дрона
Помимо полетного контроллера в дроне, естественно, есть моторы. Моторы тоже бывают разных размеров, разной формы. Они бывают вытянутые, бывают широкие. Эти моторы подбираются под конкретные задачи. То есть, если вам нужно летать долго — это одни моторы, если летать быстро — это другие моторы. Чтобы управлять этими моторами нужна специальная плата моторов, которые применяются в дронах. Можно разделить моторы на два основных вида — это моторы коллекторные и моторы бесколлекторные. Коллекторные моторы, как правило, более дешевые. В них используются специальные щетки, которые со временем изнашиваются. Бесколлекторные моторы, как правило, более мощные. Они чуть менее оборотистые, то есть вращаются чуть медленнее, но при этом отдают больше энергии. Но у бесколлекторных моторов есть минус. Для того чтобы их использовать нужна специальная плата. Эта плата называется регулятор скорости.
Регуляторы также бывают разные в зависимости от той нагрузки, которая на них идет. Они бывают более маленькие или более большие, но суть у них у всех одинаковая. Практически это ключ, который открывает или закрывает энергию, которая идет на моторы. То есть работает, как кран. Вы либо открываете поток энергии, который идет на мотор, либо закрываете ее. В этом состоит задача регуляторов скорости.
Приемник сигнала в дроне
Следующий элемент, который используется, в дроне — это приемник. Для управления летательным аппаратом мы передаем сигнал при помощи аппаратуры. Дрон должен сигнал получить. Для этого мы используем приемник. Приемник от остальных элементов можно отличить следующим образом: на нем обязательно есть антенны, которые принимают сигнал. Приемники бывают разных видов, они отличаются в зависимости от фирм аппаратуры, то есть для каждой фирмы, как правило, есть свой приемник. Они работают на разных частотах, они используют разные протоколы. Главное понимать, что они бывают для разных задач, разного размера и с разной скоростью работы.
Аккумулятор дрона
Мы с вами разобрали полетный контроллер, моторы, регуляторы скорости, которые управляют мотором, и приемники. Кроме этого нам потребуется еще силовая часть. То есть аккумулятор, который будет отдавать энергию, благодаря чему дрон будет летать.
Если мы все это соберем и подключим, то нужно установить все детали на раму квадрокоптера, которые тоже бывают разные.
Есть квадрокоптеры большие, есть маленькие, есть очень большие. Если мы все это соберем, подключим, то есть нам понадобится 4 мотора, 4 регулятора, полетный контроллер, приемник и аккумулятор. Ну и винты, чтобы моторы могли создавать тягу. Этого будет достаточно для того чтобы дрон полетел.
Полезная нагрузка дрона
Помимо минимального набора оборудования, которое нужно непосредственно для полета дрона, на него еще устанавливают дополнительную полезную нагрузку. Полезная нагрузка это все, что установлено дрон помимо необходимого для полета.
Например, если мы говорим про декоративное пилотирование, у нас в качестве полезной нагрузки идут камера и видеопередатчик. Пилот получает картинку с дрона в очки в режиме реального времени. Для этого ему потребуется камера, чтобы фиксировать эти данные, и видеопередатчик, чтобы данные отправлять пилоту.
Задачи, в которых нужно программирование дронов
В качестве полезной нагрузки устанавливается микрокомпьютер, который обрабатывает данные с датчиков, и датчики, которые эти данные собирают. Соответственно, мы разобрали, что необходимо для полета дронов. Что же реально делает специалист в области программирования? Перед специалистом поставлена задача пойти на поле и снять ортофотоплан. Что же это такое? Это высокоточная карта местности, которая снимается при помощи дрона. На него устанавливается камера, фотографируются данные. Потом фотографии обрабатываются на компьютере и склеиваются в карту.
Задача этого специалиста подобрать необходимый дрон, который нужен для выполнения задач. У него есть какой-то выбор из различных аппаратов. Когда он подобрал нужный дрон, он едет непосредственно на место съемки, проводит предполетную подготовку, проверяет заряжены ли аккумуляторы, проверяет, что все винты установлены правильно, что все закручено в область вращения винтов. Тем самым он страхует беспилотник от падения, настраивает его.
Если это автономный полет, правильно конфигурирует аппаратуру. Для ручного полета производит непосредственно сами полеты. То есть просто управляет, визуально смотря на дрон или при помощи специальных очков.
Если речь идет про автономное пилотирование, то делается специальный код программы, который смотрит за тем, чтобы беспилотник не сбился с маршрута и выполнял нужную миссию. После этого программа производит посадку дрона и осмотр техники на наличие каких-либо неисправностей. Если произошло падение, поломка или отклонение от миссии, настоящий специалист должен выявить причину этой поломки и устранить ее последствия. Нужно починить дрон и подготовить его к следующему заданию.
Юридические аспекты
Очень важным моментом являются юридические ограничения. В каждой стране есть определенная регламентирующая база, которая зависит от типа беспилотника.
Например, в России летать просто так на улице нельзя. О том, как правильно составить разрешение на полет и как правильно подать заявку и зарегистрировать дрон – это отдельный разговор. Но следует отметить, что это тоже является задачей специалиста в области эксплуатации беспилотных авиационных систем.