Классификация роботов и дронов
Содержание
Статичные и мобильные роботы
Роботы по своей природе различаются на две большие группы. Это статичные роботы и мобильные роботы.
Мобильные роботы имеют системы перемещения роботов в пространстве, а статические роботы чаще всего установлены на каком-то фундаменте или платформе и не имеют возможности перемещаться.
Могут также быть смешанные роботы, которые имеют непосредственно мобильную платформу, и размещенный на ней статичный отдельный робот, например, робот-манипулятор, может управлять объектами.
Статичные роботы
Итак, рассмотрим первый тип роботов, это статичные роботы. Чаще всего такие роботы используются в промышленности на конвейерах и управляются они единой системой. Для того чтобы действия каждого робота были слаженные и синхронизированные, например, на автомобильных заводах стоит много различных роботов манипуляторов, которые закреплены на фундаменты вдоль конвейера, и каждый из них отвечает за свою отдельную операцию — сборку какого-то компонента, покраску какого-то элемента или просто подносит инструмент или оснастку, которую берет другой робот. Это промышленные роботы.
Также статичные роботы могут быть расположены вдоль конвейерных линий, по которым двигаются непосредственно заготовки, и система машинного зрения определяет качество этих заготовок, а роботы либо их оставляют на ленте, либо могут ориентировать их для следующего этапа, либо убирать в корзину брака.
Есть роботы, которые полностью автономные, есть роботы управляемые, например, медицинский робот-манипулятор «Да Винчи», который имеет много различных элементов управления манипуляторов и выполняет точные действия оператора, который сидит за отдельным стендом и наблюдает это все через систему видеозрения.
Также такие роботы могут использоваться на кухне. Имеющие две руки манипулятора и непосредственно оперирующим продуктами и инструментом на кухне такие роботы могут непосредственно автоматически работать по программе, приготавливая то или иное блюдо.
Есть еще космические манипуляторы, которые установлены на различных летательных космических аппаратах, и они конечно сложнее. Чаще всего управляются операторами. Здесь сложность в том, что они находятся в некоторых иных условиях от земных и имеют свою специфику.
Мобильные роботы
Следующая большая группа, о которой мы сегодня поговорим, это мобильные роботы. Мобильные роботы непосредственно имеют систему перемещения в пространстве. В зависимости от среды — воздушной, водной или космической, у них есть определенные особенности, обусловленные различными физическими свойствами среды.
Мобильные роботы перемещаются в пространстве для решения тех или иных задач, и они постоянно должны считывать показания с различных датчиков, их обрабатывать, чтобы точно понимать, в каком месте пространства они находятся. И все эти процессы должны происходить непрерывно и быть тесно связанными друг с другом. При разработке системы перемещения роботов необходимо учитывать следующие моменты: это скорость или ускорение робота, точность позиционирования роботов пространстве, гибкость и надежность при различных условиях, эффективное энергопотребление робота в зависимости от среды перемещения.
Типы роботов
Среди роботов можно выделить:
- летающие роботы, которые используют воздушное пространство,
- водные и подводные роботы, которые перемещаются непосредственно в глубинных морей и океанов,
- космических роботов, которые работают в открытом космосе или на других планетах,
- а также роботов, которые используют твердую поверхность, например, работают на земле или на каких-то скалах.
Таких роботов мы рассмотрим отдельно, потому что это отдельная большая группа. А в данной статье мы их упомянем только точечно. К таким роботам у нас относятся колесные, гусеничные, шагающие, прыгающие роботы. Также мы рассмотрим отдельную категорию зооморфных роботов, которые копируют систему перемещения в пространстве на основе живых организмов.
Беспилотные летательные аппараты
Итак, давайте начнем с роботов, летающих по воздушному пространству. Большинство летающих роботов — это беспилотные летательные аппараты БПЛА, которые перемещаются по воздуху и управляются диспетчером или имеют Автопилот на борту.
Военные БПЛА
Наиболее частые применение беспилотных летательных аппаратов происходит в военных целях. БПЛА непосредственно облетают пространство по заданному маршруту и контролируют площадь, считывая с нее определенные показания, ведя видеосъемку объектов. Дроны могут уже взаимодействовать с другими роботами. Такие БПЛА бывают как самолетного, так и вертолетного типа и используются в военно-воздушных силах многих стран. Например, в России можно выделить такие беспилотники как «Шмель 1» и «Пчела 1».
Чаще всего в оснащение военных беспилотников входят оптические, инфракрасные камеры, лазерные дальномеры, которые могут идентифицировать и ранжировать цели по мере важности. Самым большим минусом таких систем является то, что их время действия ограничивается 4-5 часами.

Гражданское использование беспилотников
Но не только в военных целях используются беспилотные летательные аппараты. Все больше беспилотников мы видим и в гражданской, и в промышленной деятельности человека. Например, мультикоптеры — это беспилотные летательные аппараты, построенные по вертолетной схеме и имеющие от 3 и более лопастей. Эти устройства могут перемещать грузы в пространстве или вести видеосъемку, наблюдать за определенными объектами. Самыми популярными сейчас являются квадрокоптеры, имеющие четыре винта, вращающиеся в разные направления: два по часовой стрелке, два против часовой. Рынок сейчас наполнен такими роботами. Есть маленькие коптеры-игрушки и более серьезная дорогостоящая техника, с помощью которой можно снимать крутейшие видосы с воздуха.
Также кроме квадрокоптеров (от слова «Квадро» = 4) имеются и гексакоптеры с шестью пропеллерами, и гексакоптеры с 8 пропеллерами. Но кроме четного количества также имеется отдельная группа мультикоптеров, которые имеют три винта (трикоптеры) и 5 пропеллеров (пентакоптеры). Они имеют отдельный винт с подвижной осью, которая за счет угла поворота этой оси может вращаться вокруг себя. Такие беспилотники все чаще используются в гражданских целях и могут, например, перемещать людей в пространстве. Существует достаточно большие мультикоптеры, на которых есть кабина, где размещается человек. Этот мультикоптер может использоваться как такси. Или, например, есть мультикоптеры, которые облетают сельскохозяйственные поля и обрызгивают их различными пестицидами и удобрениями. Ну и конечно же одно из самых популярных использований мультикоптеров это перемещение грузов. Все большее количество компаний сейчас используют квадрокоптеры для перемещения грузов на небольшие расстояния от каких-то станций до непосредственно потребителей.
Программирование беспилотных летательных аппаратов достаточно сложная задача поскольку воздушная среда является неоднородной даже на уровне различных высот. Существуют различные вихревые потоки, которые могут влиять на робота. Например, если робот приближается к земле, то вихревые потоки от лопастей, отражаясь от Земли, могут оказывать существенное влияние на робота. Его может от этого очень сильно кренить в ту или иную сторону. Поэтому программирование таких роботов очень высокая и точная математическая формула, овладев которой, вы можете летать на различные расстояния.
Подводные роботы
Также есть другая категория таких роботов — подводные роботы. Вода обладает примерно схожими с воздухом свойствами, только она более плотная. Но она также не является однородной и имеет много различных факторов: свои течения или отражения. В жидких средах имеется высокая инерционная система, то есть роботу достаточно сложно, допустим, остановиться и замереть на одном месте, как это делают роботы, которые двигаются по твердой поверхности.
Традиционно в подводных роботах используется система гребных винтов, подобно воздушным, которые за счет вращения перемещают робота в водном пространстве.
Также широко распространены роботы, подражающие подводным животным: черепахам, рыбам, медузам. Примером такого робота является «Скат Гео» -подводный необитаемой аппарат, разработанный институтом морских проблем Дальневосточного отделения Российской академии наук в 1977 году.
Предназначался этот Скат для гравиметрических измерений эхолокационного обзора дна, а также для картографирования и геодезии.
К современным подводным аппаратам можем отнести такие как «Ровбилдер» малогабаритный подводный аппарат, оснащенный подводным GPS и самым маленьким в мире гидроакустическим модемом.

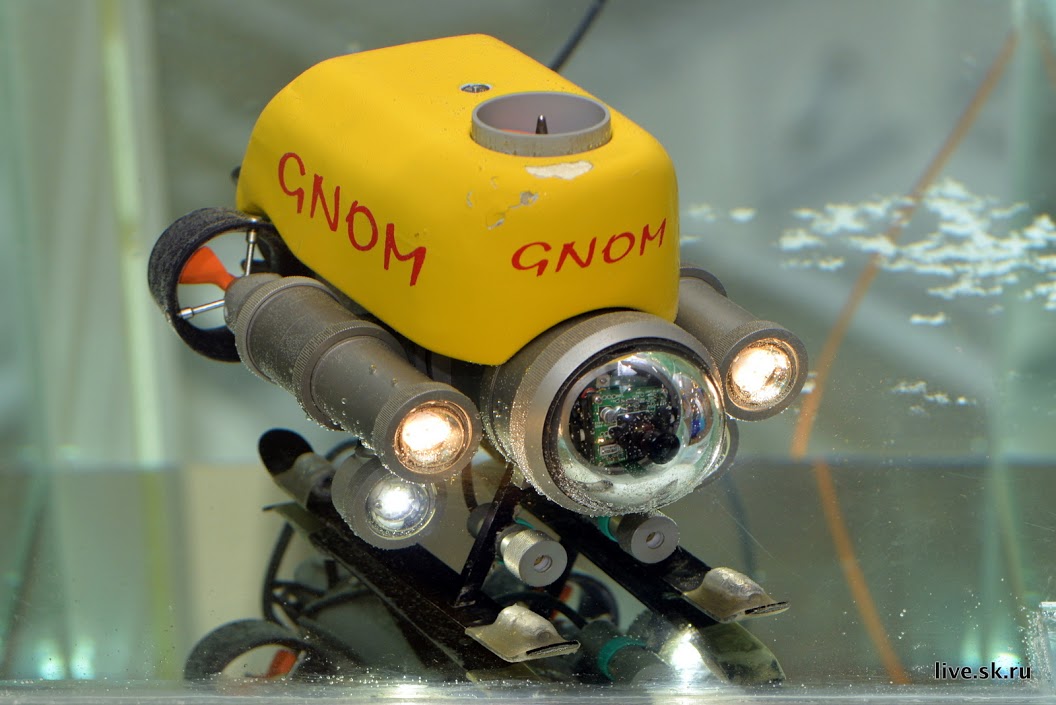
Также нельзя не отметить глубоководный управляемый аппарат «Гном», разрабатываемый одноименной компанией из России. «Гном» российский телеуправляемый подводный аппарат относится к категории микрорайв, весит 3 килограмма, отличается малыми масса-габаритными характеристиками. Весь комплект оборудования весит около 20 килограмм, причем функциональность такого подводного робота не уступает более старшим классам.
В недалеком будущем могут появиться нанороботы-врачи. Так называемые наноботы, размером меньше 100 нанометров. Они, например, могут циркулировать в нашей крови, и в этой жидкостной среде выполнять различные функции по лечению человека. Конечно, за этим еще пока будущее, но такие разработки уже ведутся.
Задача будущего научить роботов самовоспроизводиться, такие наноботы репликаторы будут приносить пользу человечеству.
Зооморфные роботы
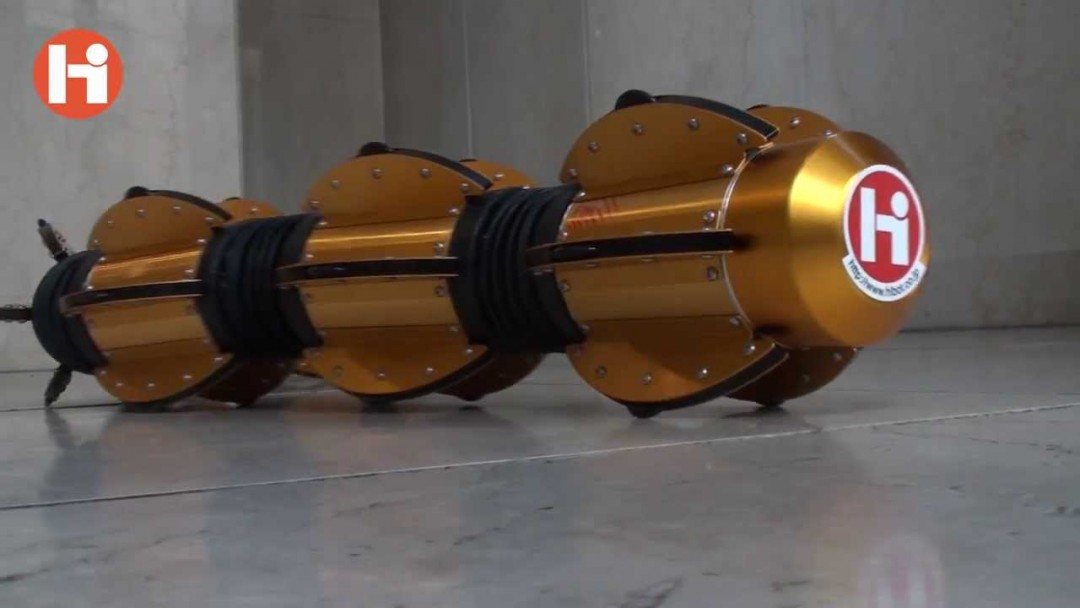
Робот-змея
Зооморфные роботы используют при передвижении различные телодвижения, взятые непосредственно у животных. Например, змеи, которые могут ползать по деревьям и плавать под водой, скатов или медуз, которые плавают непосредственно под водой, и многих других. Одним из представителей зооморфных роботов является робот-змея ACM R5. Робот состоит из нескольких связанных между собой модулей, которые могут двигаться плавно по твердой ровной поверхности и плавать в воде. Передний модуль оснащен беспроводной камерой со специальным механизмом, которая может сохранять ориентацию объектива. Такой робот предназначен для подводных исследований и работ в труднодоступных местах, например, для поиска людей в завалах зданий.
Роботы кенгуру и медузы
Компанией «Феста» создана линейка зооморфных роботов, одним из которых является бионический кенгуру. Уникальность данного робота в том, что он очень высокоэнергоэффективный. Повторяя прыжки настоящего кенгуру, он может восстанавливать свою энергию и даже накапливать ее для последующего прыжка. Такой робот относится и к зооморфным, и к прыгающим роботам.
Также данная компания разработала уникальные роботомедузы в двух вариациях. Это AkvaGelly, которая может перемещаться непосредственно в водном пространстве, имея собственный электромотор и адаптивную механическую систему, и AirGelly — воздушный робот-медуза, которая может парить воздухе, используя баллон, наполненный гелием.
Также летающие роботы этой компании представляют собой роботов стрекозу, летучую мышь и даже бабочку. Это уникальные механические роботы, в которых сложная кинематика и программирование движения этих роботов достаточно сложны. Они основаны на высокоинтеллектуальных системах с применением искусственного интеллекта.
Роботы-скалолазы
К специализированным системам можно отнести роботов скалолазов, которые перемещаются по отвесным скалам и стенам, используя либо различные крюки, как у человека, либо присоски.
Они могут перемещаться в труднодоступных отвесных местах и стенах и даже ходить по потолку. К таким роботам можно отнести гикконоподобных роботов, которые с одной стороны относятся к зооморфным, и выполнены с четырьмя лапами, управляемых серводвигателем. С другой стороны, это шагающая система движения, но имеющая на своих конечностях специальные присоски, которые могут прилипать или отлипать от поверхности. Применение этих нескольких технологий связывает робота в отдельный класс роботов, способных перемещаться по плоской стене.
Самая большая проблема таких роботов — это контакт с поверхностью в виде присоски и поддержание вакуума между поверхностью и непосредственно присоской, которая была решена с помощью метода нулевого перепада. На присоске по кругу движется вода с огромной скоростью, тем самым увеличивая плотность соприкосновения с поверхностью и обеспечивая высокий вакуум.
Еще одним из специализированных роботов, которые работают на вертикальных поверхностях, является робот Мойщик окон, оснащенный сильным 80-ватным вакуумным двигателем и круглыми дисками, на которых располагаются микрофибровые салфетки. Данный робот может в автоматическом режиме чистить окна и управляться, например, со смартфона.
Шагающие, гусеничные и колесные роботы
Ну и вот мы наконец-то дошли до тех самых популярных роботов, большая часть которой относится к роботам, перемещающимся по твердой горизонтальной или немного пересеченной поверхности. Это шагающие роботы, гусеничные роботы и колесные роботы. Они занимают примерно 80 процентов от всех роботов. И начнем мы с вами шагающих роботов, потому что именно эту систему перемещения используют человек. И человек грезит созданием себе подобных роботов, которые будут выполнять за него рутинную работу. Вот пример шагающий системы движения «Android Новоробо». Это робот, предназначенный для игры в робо-футбол. Данные система движения состоит из огромного числа серводвигателей, которые обладают высокой точностью и мощностью. Каждая нога здесь имеет шесть степеней свободы, поэтому шагающая система особенно двуногих роботов достаточно сложная и требует очень высокой квалификации программирования этого движения. Здесь можно заметить большую площадь соприкосновения с поверхностью, чтобы робот был достаточно устойчив.
Следующая категория роботов — это шагающие роботы с четырьмя, шестью или даже 8 ногами. Такие роботы программируются чуть легче, потому что у них достаточно высокое количество опор. Робот может попеременно использовать, например, две или четыре ноги. Например, 4-ногий робот может одновременно использовать только две ноги. Две ноги у нас находится внизу, а две остальные в этот момент поднимаются, поворачиваются на определенный угол и опускаются. При этом используются по два серводвигателя, отвечающие за подъем и за поворот ноги. И так получается, что робот движется синхронно. Сначала противоположные две ноги, потом следующие противоположные две ноги.
Самое сложное при программировании именно шагающих систем движения в том, что используется огромное количество различных сервоприводов или моторов. Здесь нужно синхронизировать все эти моторы так, чтобы каждый из них каждую долю времени выполнял поворот на определенный угол. Нужно, чтобы робот при таком движении был достаточно устойчив. Одним из примеров таких роботов является четырехногий робот компании Boston dynamics, который имеет невероятную скорость перемещения, имеют интеллектуальную систему гироскопов, которые удерживают робота в равновесии. Он способен выходить из самых затруднительных ситуаций даже на скользкой поверхности.
Гусеничные роботы
Гусеничная система движения имеет несколько своих преимуществ. Первое это то, что у нее повышенная проходимость за счет большей длины соприкосновения с поверхностью. Также у гусениц меньше давление на грунт, например по сравнению с шагающей системой за счет большой площади соприкосновения с поверхностью движения. Тем самым робот предохраняется от глубокого погружения в грунт.
Но и у таких систем есть свои недостатки. Первое — это износ гусениц, потому что постоянное движение вызывает механический износ. Случается поломка траков, если гусеницы состоят из отдельных элементов. И тогда вся система выходит из строя. Опасно попадание снега или камней, или какой-то грязи между катками и гусеницами. Сами гусеницы могут состоять как из отдельных соединенных между собой траков, так и из прорезиненных цельных гусениц, которые имеют много преимуществ. В роботах используется чаще всего именно такие цельные гусеницы. Также на гусеницах имеются грунтозацепы, которые обеспечивают сцепление с рыхлым снегом или с песком, увеличивая тем самым проходимость.
Программирование гусеничных систем движения достаточно простое. В основе лежат два колеса трака, которые непосредственно соединяются с остальной гусеницей и отвечают за вращение каждой из гусениц либо в одну сторону, либо в противоположную. Если у нас движение колес идет в одну и ту же сторону, то наш робот движется либо вперед, либо назад. Если идут в разные стороны, то наша гусеничная система начинает либо разворачиваться на месте, либо двигаться по углом или по дуге.
Гусеничные роботы применяются там, где нужна повышенная проходимость, например в песках, в болотистой местности, в грунте, там где нет дорог. Используются чаще всего службами МЧС и военными непосредственно при боевых операциях, где нужно перемещать роботов непосредственно в самых сложнейших условиях.
Колесные роботы
Колесные роботы — самая популярная система передвижения роботов, у которой есть огромное количество достоинств такие как скорость, мобильность, простота программирования, маневренность. Ну и конечно достаточно высокая проходимость. Количество колес может быть абсолютно разным: от одного до нескольких десятков в зависимости от поставленных задач. И одна из самых популярных колесных систем в робототехнике это трехточечная с двумя ведущими колесами, подключенными непосредственно к двигателям.
Программирование таких систем достаточно простое, так же, как и гусеничных. Здесь имеется два колеса, и от скорости и направления вращения колес мы можем с вами получать абсолютно разные результаты. Когда два колеса движутся в одну сторону с равной скоростью, то робот перемещается вперед или назад. Когда у нас колеса вращаются в разные стороны с одинаковой скоростью, мы получаем с вами разворот робота. Если у нас одно колесо заблокировано и не движется, а второе колесо движется, то робот может поворачивать одним колесом. И еще один случай, когда у нас колеса движутся в одном направлении, но с разной скоростью. Здесь мы можем двигать робота по определенной дуге с разным радиусом.
Хочется отметить колесных космических роботов, которые работают на различных планетах. Первым таким роботом был Луноход 1, который работал на поверхности Луны в 70-71 годах. Он разработан был нашими советскими инженерами, имел 8 независимых колёс, управляемых электродвигателями. По Луне он прошел 10,5 километров, выполнив очень важные задачи по исследованию нашего спутника Земли.
Заключение
Каждая из рассмотренных систем выбирается непосредственно под те задачи, которые должен выполнять робот. Программирование этих систем перемещения также зависит от внешних факторов, от таких условий, в которых находится наш робот, от двигателей, которые необходимы для того, чтобы вращать колёса или управлять какими-то системами. Контроллер, язык программирования, всё это должно быть связано в единую систему, чтобы наш робот был максимально эффективен.